Sprint 1
Sprint 2
Sprint 3
Deployment
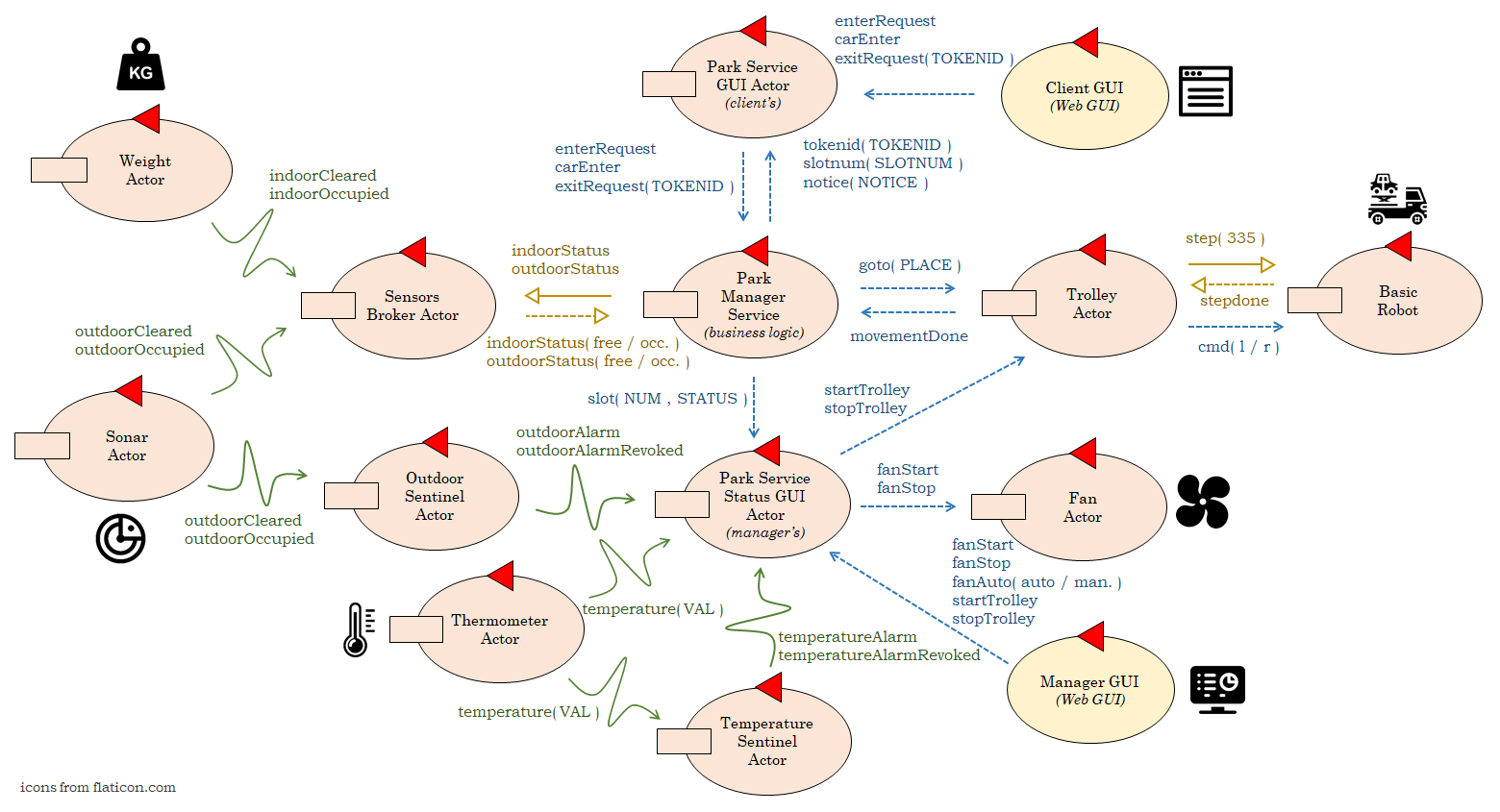
Conceptual architecture of the system
The computational nodes
For this deployment on a testing environment, we decided to split the actors into two contexts. The context with the business logic and the main components of the system is to be run on a
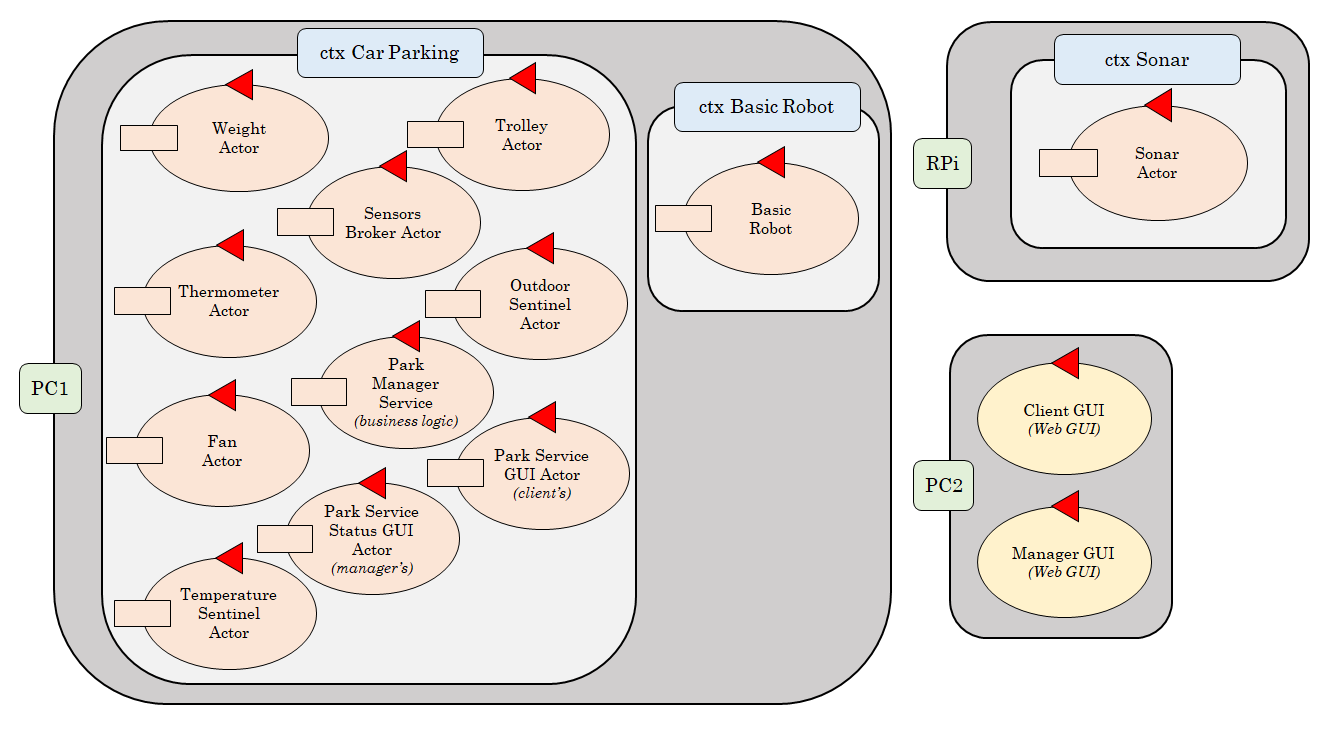
The Web GUIs
The
gradlew -b build.gradle.kts distTar
The
FROM openjdk:8-jre-alpine EXPOSE 8101 ADD ./build/distributions/*.tar / WORKDIR /carparking.webgui-1.0/bin CMD ["sh", "carparking.webgui"] # docker build --rm -t client-carparking-webgui . # docker save -o client_carparking_webgui.tar client-carparking-webgui # docker load -i client_carparking_webgui.tar
Since they are deployed on the same node, we can leverage a single
services:
client:
image: client-carparking-webgui
ports:
- 8100:8100
manager:
image: manager-carparking-webgui
ports:
- 8101:8101
# docker-compose -f carparking_webgui.yaml up
The QAK contexts
A
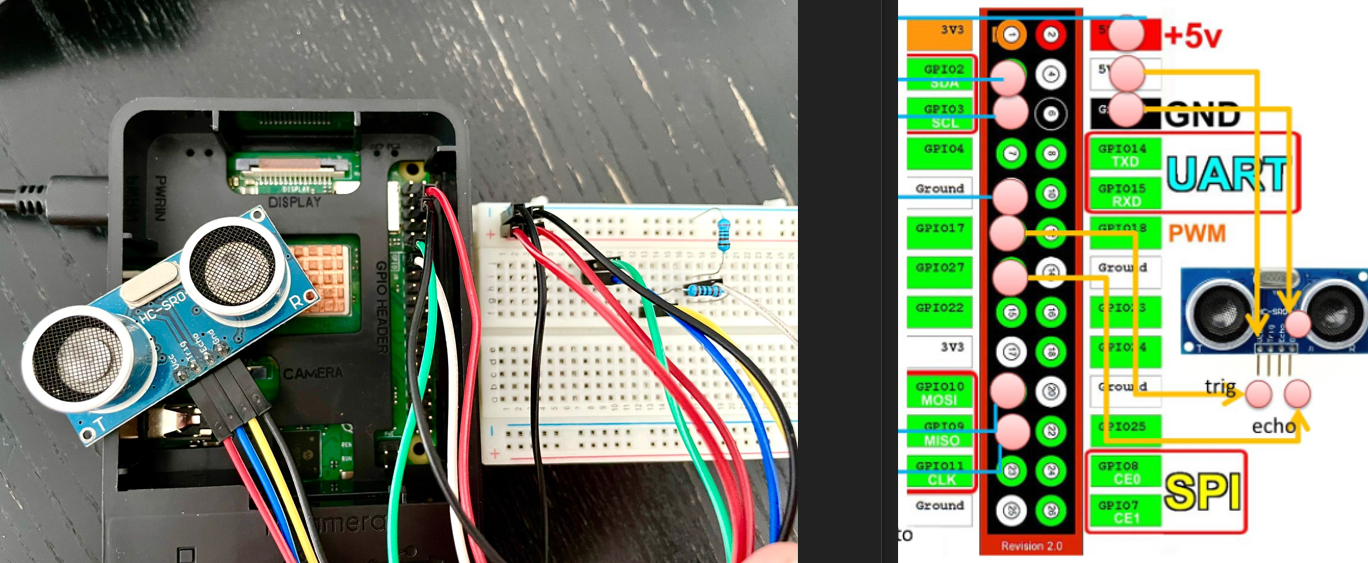
Since the difficulty to make
distZip {
into(project.name+"-1.0/bin") {
from '.'
include 'sonar.c'
include 'sonar'
include '*.pl'
include 'parkingMap.bin'
include 'parkingMap.txt'
include 'Californium.properties'
}
}
# gradle -b build2021.gradle distZip
Final testing
We created a testing file as requested by the client, assuming that the temperature is and remains ok, the fan is off, INDOOR and OUTDOOR are free and some parking slots are occupied since the beginning. We need to simulate on the system an
a. Enter request
-
The business logic automaton enters the
acceptIN state and requests to known the INDOOR state from the sensorsbrokeractor. -
The sensorsbrokeractor replies that the INDOOR is free, and the business logic switches to the
informIN state. - The business logic checks the slotnum and sends it to the customer gui.
b. Carenter
-
When it receives the carenter request, the business logic goes to the
moveToIn state and commands the trolley to go to INDOOR. - The trolley checks the position of the INDOOR and asks the directional planner to calculate the route.
-
The trolley then changes its state from
idle toworking and performs the moves given by the directional planner until it receives a null move. -
The trolley communicates the termination of the movement to the business logic, which passes to the
receipt state. - The business logic generates a tokenid, associates it with the previously calculated slotnum and communicates it to the client.
-
The business logic switches to the
moveToSlotIn state, communicates the slot occupation to the manager's gui and requests the trolley (as already described) to go to the correct parking slot. -
When the trolley finishes its movement, the business logic switches to the
moveToHome state and requests the trolley (which enters theidle state) to go to the home position.
c. Pick up request
-
Before the trolley returns home, the business logic receives the exit request and goes into the
acceptOUT state. - The business logic compares the received tokenid with the registered ones, determines the slotnum and requests the OUTDOOR status from the sensorsbrokeractor.
- The sensorsbrokeractor replies that the OUTDOOR is free and the business logic notifies the client gui that the request has been accepted.
-
The business logic passes to the
moveToSlotOut state and commands the trolley (as previously described) to go to the parking slot associated with the calculated slotnum, passing to statusworking . -
When the trolley reaches the position, the business logic goes to the
moveToOut state, records the release of the parking slot (communicating it to the manager's gui) and requests the trolley to go to the OUTDOOR. -
Once the OUTDOOR is reached, the business logic switches to the
moveToHome state and asks the trolley (now inidle state) to go to the home position.

