Requirements
Automated Car-Parking
A company intends to build an automating parking service composed of a set of elements:- A software system, named ParkManagerService, that implements the required automation functions.
- A DDR robot working as a transport trolley, that is intially situated in its home location. The transport trolley has the form of a square of side length RD.
- A parking-area is an empty room that includes;
- an INDOOR to enter the car in the area. Facing the INDOOR, there is a INDOOR-area equipped with a weigthsensor that measures the weigth of the car;
- an OUTDOOR to exit from the parking-area. Just after the OUTDOOR, there is OUTDOOR-area equipped with a outsonar, used to detect the presence of a car. The OUTDOOR-area, once engaded by a car, should be freed within a prefixed interval of time DTFREE;
- a number N (N=6) of parking-slots;
- a thermometer that measures the temperature TA of the area;
- a fan that should be activated when
TA > TMAX , where TMAX is a prefixed value (e.g. 35)
|r, 0, 0, 0, 0, 0, 0, X, |0, 0,
The map includes the positions of the parking-slots (marked above with the symbolX, X, 0, 0, 0, X, |0, 0,X, X, 0, 0, 0, X, |0, 0,X, X, 0, 0, 0, X, |0, 0, 0, 0, 0, 0, 0, X, |X, X, X, X, X, X, X, X,X ) and of the fixed obstacles in the area (the walls marked with the symbol X).
The area marked withX is a sort of 'equipped area' upon which the transport trolley cannot walk. Thus, to get the car in the parking-slot(2,2) , the transport trolley must go in cell(1,2) .
The proper scene for the WEnv is reported in: parkingAreaConfig.js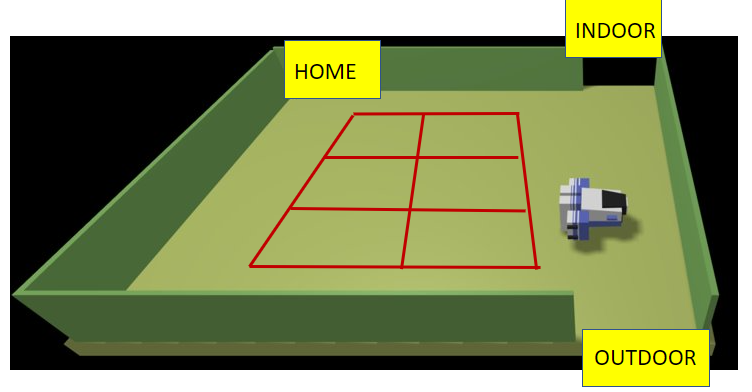
- a parking-manager (an human being) which supervises the state of the parking-area and handles critical situations.
User stories
As a- I intend to use a ParkServiceGUI provided by the ParkManagerService to notify my interest in entering
my auto in the parking-area and to receive as answer the number SLOTNUM of a free parking-slot (1<=SLOTNUM<=6).
SLOTNUM
==0 means that no free slot is available. - If SLOTNUM
>0 , I move my car in front to the INDOOR, get out of the car and afterwards press a CARENTER button on the ParkServiceGUI. Afterwards, the transport trolley takes over my car and moves it from the INDOOR to the selected parking-slot. The ParkServiceGUI will show to me a receipt that includes a (unique) TOKENID, to be used in the car pick up phase.
- I intend to use the ParkServiceGUI to submit the request to pick up my car, by sending the TOKENID previously received.
- Afterwards, the transport trolley takes over my car and moves it from its parking-slot to the OUTDOOR-area.
- I move the car, so to free the OUTDOOR-area.
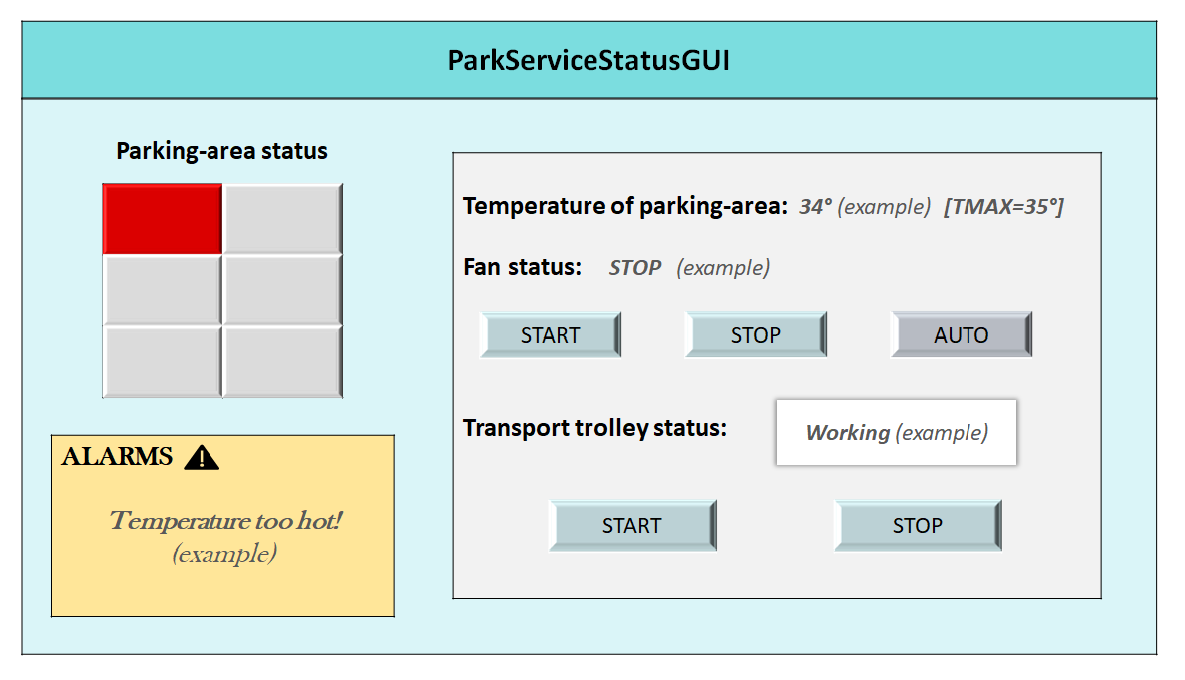
- I intend to use the ParkServiceStatusGUI provided by the ParkManagerService
to observe the current state of the parking area, including the value TA of the temperature,
the state of the fan and the state of the transport trolley (
idle, working or stopped ). - I intend to stop the transport trolley when
TA > TMAX , activate the fan and wait untilTA < TMAX . At this time, I stop the fan and resume the behavior of the transport trolley. Hopefully, the start/stopof the fan could also be automated by the ParkManagerService, while the start/stopof the transport trolley is always up to me. - I expect that the ParkManagerService sends to me an alarm if it detectes that the OUTDOOR-area has not been cleaned within the DTFREE interval of time.
Requirements
The ParkManagerService should create the ParkServiceGUI (for the client) and the ParkServiceStatusGUI (for the manager) and then perform the following tasks:
acceptIN: accept the request of a client to park the car if there is at least one parking-slot available, select a free slot identified with a unique SLOTNUM.
A request of this type can be elaborated only when theINDOOR-area is free , and the transport trolley is at home or working (not stopped by the manager). If the INDOOR-area is already engaged by a car, the request is not immediately processed (the client could simply wait or could - optionally - receive a proper notice).
- informIN: inform the client about the value of the SLOTNUM. If
- moveToIn: move the transport trolley from its current localtion to the INDOOR ;
- receipt: send to the client a receipt including the value of the TOKENID ;
- moveToSlotIn: move the transport trolley from the INDOOR to the selected parking-slot;
- backToHome: if no other request is present, move the transport trolley to its home location, else acceptIN or acceptOUT.
- moveToHome: if not already at home, move the transport trolley to its home location.
acceptOUT: accept the request of a client to get out the car with TOKENID. A request of this type can be elaborated only when theOUTDOOR-area is free and the transport trolley is at home or working (not stopped by the manager). If the OUTDOOR-area is still engaged by a car, the request is not immediately processed (the client could simply wait or could - optionally - receive a proper notice).- findSlot: deduce the number of the parking slot (CARSLOTNUM) from the TOKENID;
- moveToSlotOut: move the transport trolley from its current localtion to the CARSLOTNUM/parking-slot ;
- moveToOut: move the transport trolley to the OUTDOOR ;
- moveToHome: if no other request is present move the transport trolley to its home location;
else acceptIN or acceptOUT
-
monitor: update the ParkServiceStatusGUI with the required information about the state of the system. -
manage: accept the request of the manager to stop/resume the behavior of the transport trolley.
About the devices
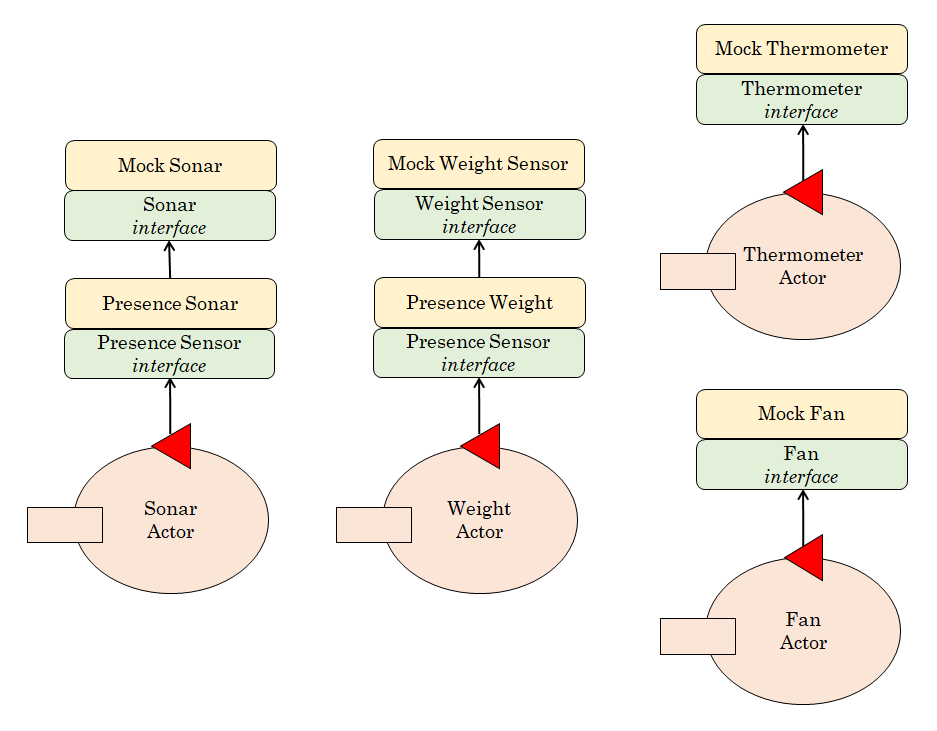
All the sensors (weigthsensor, outsonar, thermometer ) and the fan should be properly simulated by mock-objects or mock-actors.When available a Raspberry and a sonar
The outsonar could be a real device. We can simulate the presence/absence of a car.Non functional requirements
- The ideal work team is composed of
3 persons . Teams of 1 or 2 persons (NOT 4 or more) are also allowed. - The team must present a
workplan as the result of the requirement/problem analysis, including some significantTestPlan . - The team must present the sequence of
SPRINT performed, with appropriate motivations. - Each
SPRINT must be associated with its own 'chronicle' (see templateToFill.html) that presents, in concise way, the key-points related to each phases of development.
Hopefully, the team could also deploy the system using docker. - Each team must publish and maintain a GIT-repository (referred in the templateToFill.html) with the code and the related documents.
- The team must present (in synthetic, schematic way) the
specific activity of each team-component .
Requirements analysis
Glossary
Transport trolley: - a squared robot of side
RD able to pick up a car and transport it from a point of the map to another; - the robot picks up and puts down cars from the square in front of it;
- while the car is on the robot, they fill the same space on the map;
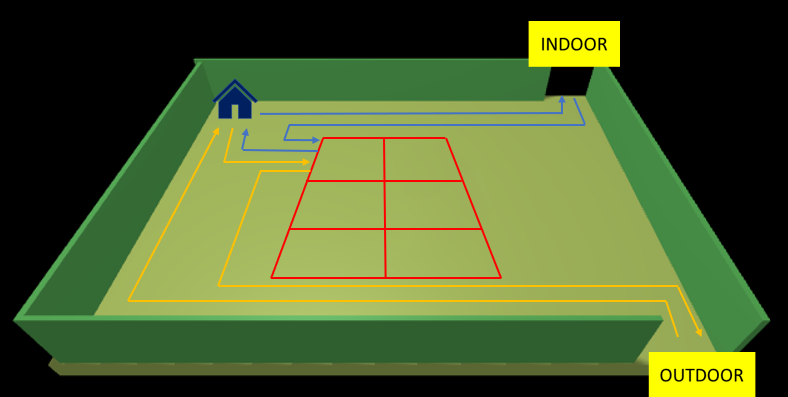
Home: the home location of thetrolley is the north-western corner of the parking-area, facing south;Parking-area: rectangular empty room containing theparking-slots , the home location and some maneuvering space for thetrolley ;INDOOR-area: the area where cars wait for thetrolley to pick them up; it is not part of theparking-area ;OUTDOOR-area: the area where thetrolley leaves the cars to be picked up by their owners; it is not part of theparking-area ;Parking-slot: a squared portion of theparking-area of sideRD where parked cars are stored by thetrolley ; there are six of them and they are identified by aSLOTNUM ;Fan: device able to lower the temperature of theparking-area ;Fixed obstacles: the parts of theparking-area where thetrolley is not able to pass through;Hopefully / Optionally: the corresponding requirements should be implemented and employable as an alternative to the default behavior.
Provided software and hardware
The transport trolley
The
Since every position in the
The parking-area and its points of interest
The customer provided a
The customer provided also a second description of the parking-area as a
All the sensible spots in the
Home Location: [0, 0, S] INDOOR-area: [6, 0, N] OUTDOOR-area: [6, 4, S] Parking-slot 1: [1, 1, E] Parking-slot 2: [1, 2, E] Parking-slot 3: [1, 3, E] Parking-slot 4: [4, 1, W] Parking-slot 5: [4, 2, W] Parking-slot 6: [4, 3, W]
The
Weightsensor and outsonar
The customer clarified that the
While being two physically different components, the
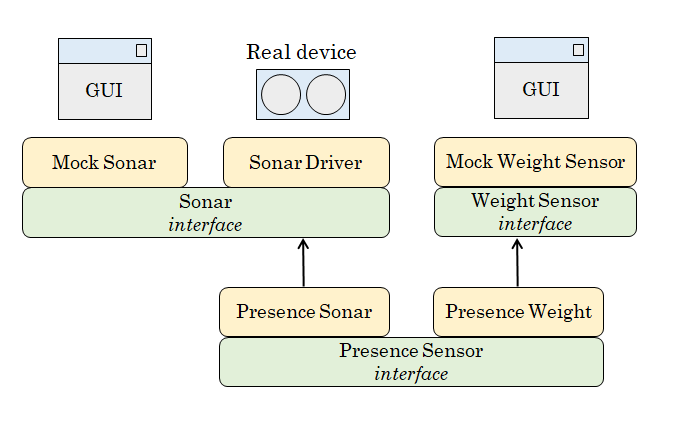
These sensors should be
Concerning the additional requirement to use a real device for the
Thermometer and Fan
The customer clarified that the
Much like the sonar and the weight sensor, the
ParkServiceGUI and ParkServiceStatusGUI
The
The customer has intended that the two GUIs must be very available entities able to function on many devices. They are likely best to be designed as
User stories
The user stories provided by the customer are sufficiently precise and complete and they do not need immediate elaboration.Informal test plan
The requirement details provided by the customer are accurate enough to act as an informal test plan on their own.Problem analysis
Relevant aspects
- The system to be built will be a distributed system, consisting of several macro-components:
- the
transport trolley ; - the
weight sensor ; - the
thermometer ; - the
fan ; - the
outsonar ; - our
application (ParkManagerService, complete with its two GUIs), which sends commands to the trolley in order to meet the requirements. - This distributed system, made of several heterogeneous components, would benefit greatly from an
actor-based framework with support formessage-passing interaction; for this purpose, we should leverage the available QAK meta-model to build executable models; - There isn't any conceptual abstraction gap for this problem, however since we proposed to exploit the
QAK meta-model , we are put in front of anabstraction gap regarding the use of languages because QAK relies on Java and Kotlin to work. However, QAK itself manages to fill a large part of this limitation, as it is supplied with its own domain specific language and because it was designed specifically for heterogeneous distributed systems; - The
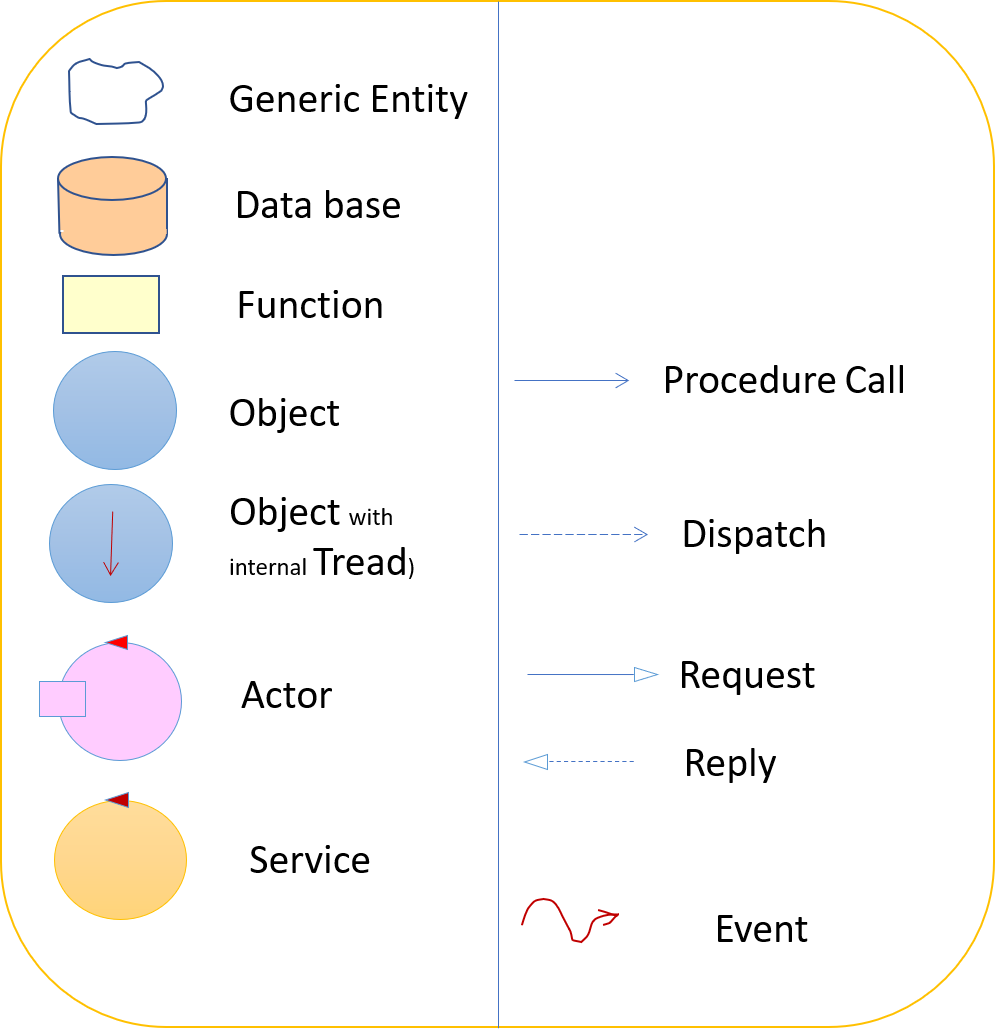
QAK meta-model provides compatibility with the communication protocolsTCP ,MQTT andCoAP , equally valid for the interaction between actors; regarding the communication with theWEnv (or other compatible trolleys), both supported interaction models (HTTP POST andWebSocket ) are fit for the task. - We will use the following
legend for all the diagrams in the document:
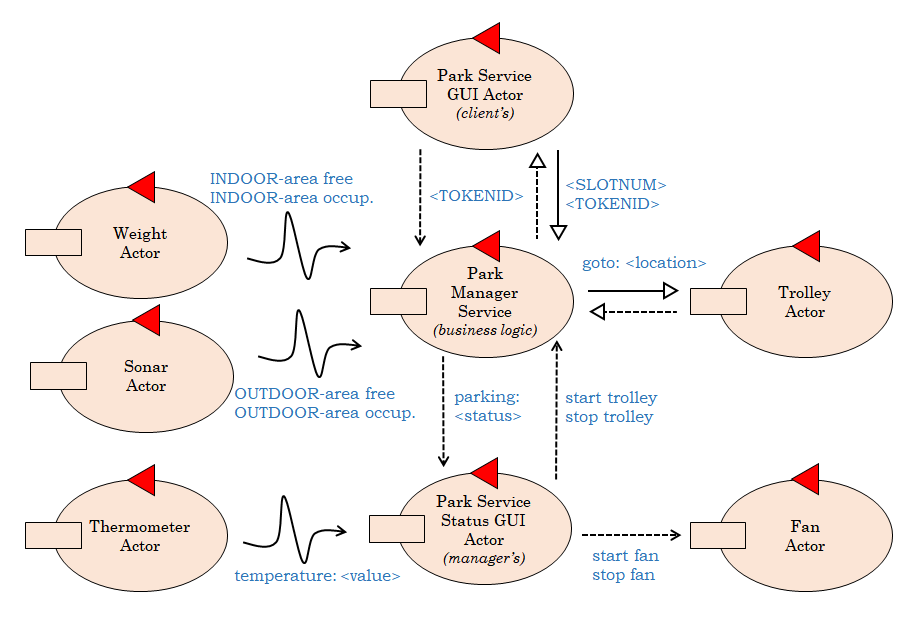
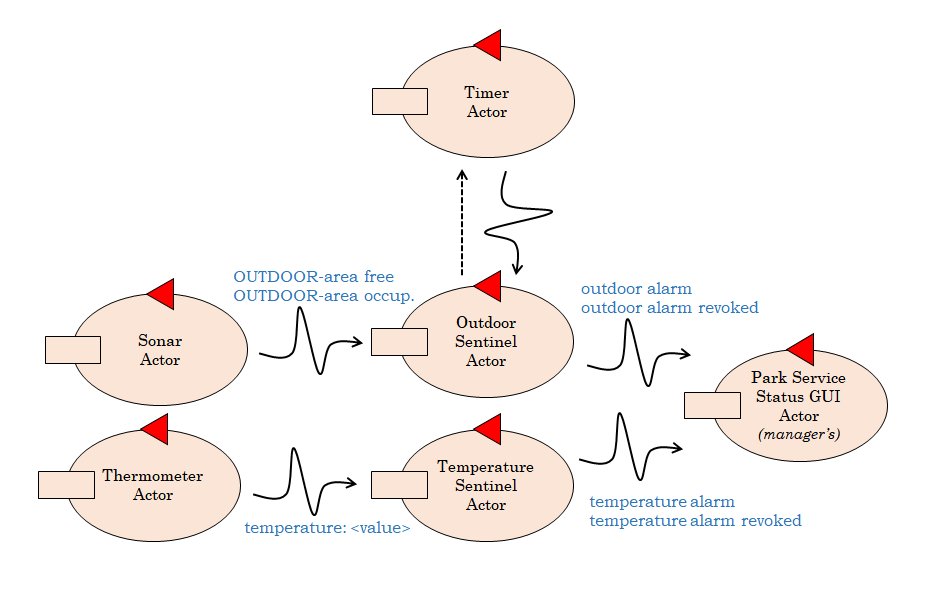
Logical architecture
Each logical component should be modeled as an actor or split in two or more actors as expressed by the following general architecture:
Moreover, here's the conceptual architecture of the alarms sub-system:
The business logic
The core business logic can be conveniently described as a finite-state machine to be enclosed into a proper actor. Such actor controls the main state of the application and presents a purely
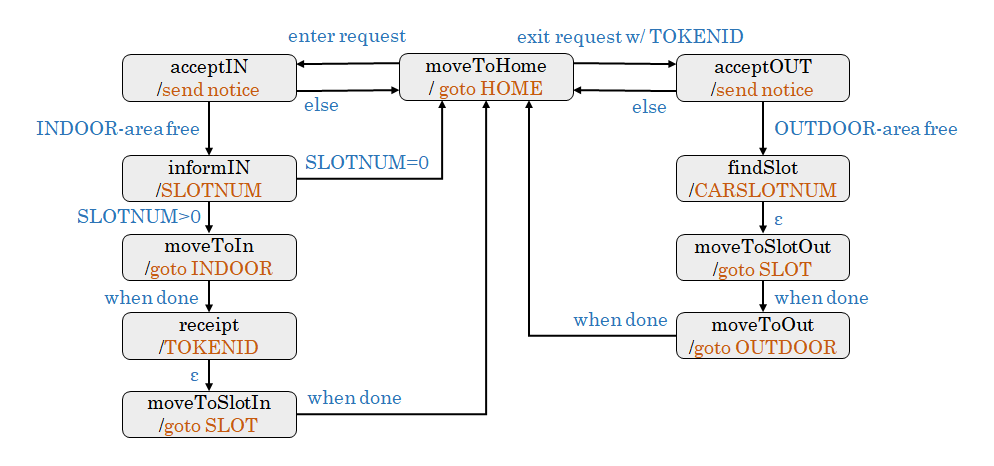
The
The additional task
In states
Sensors and actuators
Each actor using a
Much like the presence sensors, the
The
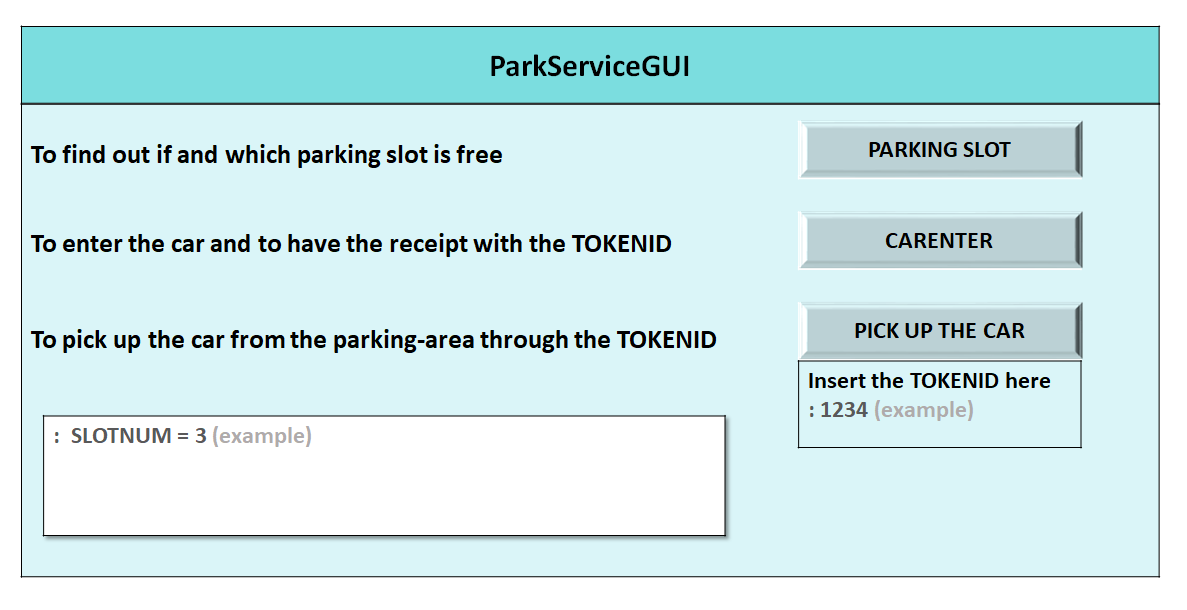
The user interfaces
The
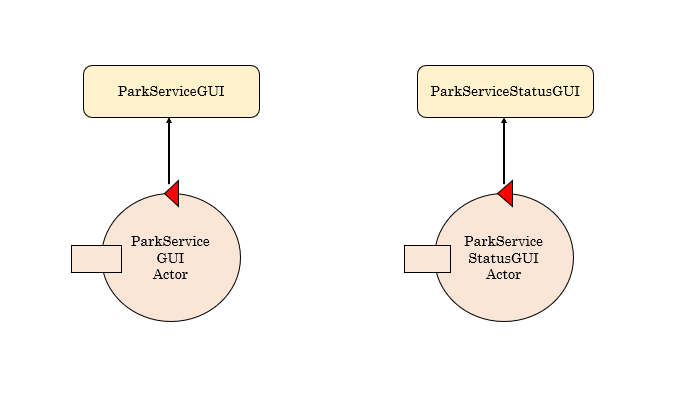
The
The
- The
PARKING SLOT button is needed to notify the interest by a client inentering its car in theparking-area and to receive the numberSLOTNUM of a freeparking-slot (between 1 and 6). IfSLOTNUM is equal to 0, it means that no free slot is available. - The
CARENTER button can be pressed only ifSLOTNUM is greater than 0, so that thetransport trolley may take the car from theINDOOR to the assignedparking-slot . Then it would show the client a receipt that includes the uniqueTOKENID that will be needed later to pick up the car. - The
PICK UP THE CAR button is needed topick up the car with theTOKENID received before, which needs to be written in its specific section under the button. The client's car will then be moved to theOUTDOOR-area .
The
Driving the trolley
To access the
The diagram hereunder presents a possible architecture taking advantage of the suggested tools
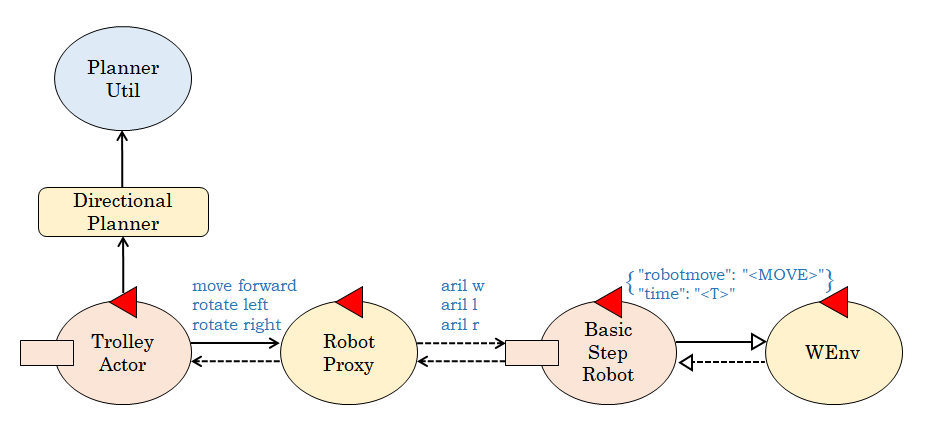
The
The
The alarms
The system requires the presence of a timed alarm for when the
We suggest the presence of two
Refined test plan
User story 1 - parking phase
- In case of occupied INDOOR-area, when the client presses the
PARKING SLOT button he receives a notification that no request can be sent. - The INDOOR-area is free and the client uses the
PARKING SLOT button, the business logic processes the request and the SLOTNUM is displayed in the GUI itself. - If SLOTNUM > 0, then the client presses the
CARENTER button and the transport trolley positions itself in the INDOOR-area and then in the slot previously indicated by SLOTNUM. Then that specific parking slot changes status and is shown as occupied in the ParkServiceStatusGUI table. Finally, the transport trolley returns to its home. At that point, a receipt with a TOKENID is shown to the client on the screen. - If SLOTNUM = 0, a message is shown on the screen indicating that there is no space in the parking-area and, if the client decides to wait for its turn, as soon as SLOTNUM > 0 then his request is processed as in the previous case.
- If the transport trolley status is stopped and the client presses the
CARENTER button, the request is rejected and the client is notified.
User story 2 - car pick up phase
- When the client presses the
PICK UP THE CAR button, the request to enter the TOKENID is shown on the screen. If the code entered exists and is correct and the OUTDOOR-area is free, the transport trolley goes to the parking-slot (associated to that TOKENID) and then to the OUTDOOR-area. Finally it returns to home. Then that specific parking-slot will change status and will be shown as free in the ParkServiceStatusGUI table. - If the OUTDOOR-area is occupied, when the client presses the
PICK UP THE CAR button, he receives a notification that no request can be sent. As soon as the area is free, his request will be processed as in the previous case. - If the entered code does not exist or is not correct, then an error message will be shown on the screen and the client will have to re-enter the TOKENID.
- If the transport trolley status is stopped and the client presses the
PICK UP THE CAR button, the request is rejected and the client is notified.
User story 3 - parking-manager
- When the parking manager presses the
START button in the fan area, the mock of the fan declares to have turned on and the fan status changes to START. When theSTOP button is pressed and the fan declares that it has turned off, the fan status changes to STOP. - When the
AUTO button has been pressed and the temperature rises above TMAX, the fan activates itself and the fan status changes to START. When the temperature value returns below TMAX, the fan turns off and the fan status changes to STOP. - When the parking manager presses the
START button in the transport trolley area, the latter stops working and its status in the ParkServiceStatusGUI changes to START. When he then presses theSTOP button, the transport trolley resumes its work and its status becomes STOP. - When the OUTDOOR-area remains occupied more than the DTFREE time interval, then an alarm message is shown on the screen. As soon as the OUTDOOR-area is free again, the error message is no longer shown.
- When the temperature is higher than TMAX, an alarm message is shown on the screen. As soon as the temperature is again lower than the threshold value, the error message is no longer shown.
Executable model
A QAK executable model of the logical architecture can be retrieved from the following local link: trolley.qak (copy on GitHub here). Every actor introduced in the main logical architecture and in the alarms sub-system has been implemented.
The QActor
The QActor
The QActors
The CodedQActors
The QActors
Instead of converting the format of the map to obtain a binary file, as previously discussed, we found easier to program a new rudimentary tool, called
Testing
The executable model is compliant with the following
- The transport trolley is in
home position initially, with coordinates [0, 0, S]. - When the weightsensor button is pressed, an "indoorOccupied" event and an enter request are sent. So, the "SLOTNUM" dispatch is sent and the
INDOOR-area , with coordinates [6, 0, N], results occupied. - The transport trolley starts its path going in that cell and a "TOKENID" dispatch is sent. Then it goes on the only free
parking-slot (the number 1, with coordinates [1, 1, E]) and comes back tohome . - Then an exit request is sent and transport trolley goes in front of the
parking-slot in which the car was parked (simulating the pick up of the car). It positions itself in front of theOUTDOOR-area , with coordinates [6, 4, S]. At last it comes back in itshome . - If the weightsensor button is pressed while the parking-slot 1 is occupied, the transport trolley mustn't go to the INDOOR-area to take the car.
Workplan
The advancement of the project can be followed on this GitHub repository: https://github.com/JackFantaz/BadalamentiFantazziniFinalTask2021.git
Based on what was discussed in this initial phase, we concluded that there will be needed
Sprint 1
- Main business logic with just one parking-slot;
- Communication with the virtual robot;
- ParkServiceGUI for the clients;
This sprint will start on
Sprint 2
- Weightsensor, outsonar and thermometer;
- Fan with manual control only;
- ParkServiceStatusGUI for the parking-manager with the buttons to start/stop the trolley disabled.
We expect this sprint to be completed within
Sprint 3
- Possibility to start and stop the behavior of the trolley;
- Support for all the six parking-slots.
- OUTDOOR-area alarm and temperature alarm;
- Option to automate the control of the fan;
- Support for the real sonar device.
We expect this sprint to be completed within

