Project
Sprint 1
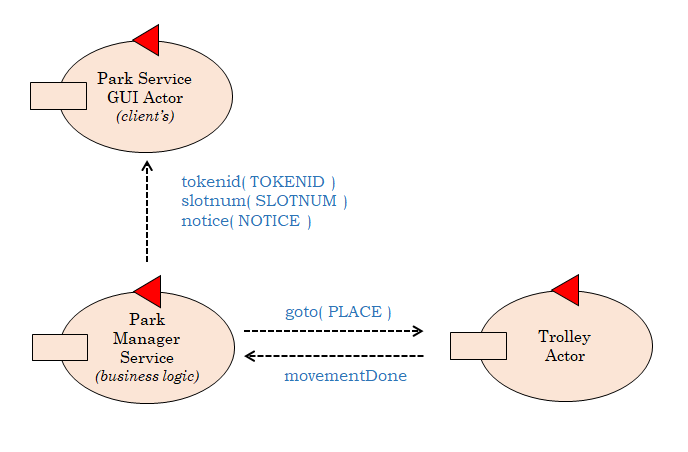
The business logic
The business logic encoded in the
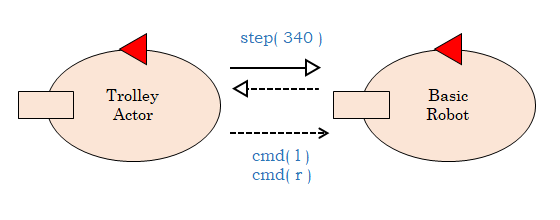
The trolley
The customer provided a new piece of software, called BasicRobot, which is compatible with the
Our
The coordinates of the points of interest of the parking-area, previously hard-coded inside the
home(0, 0, s). parking(1, 1, e). indoor(6, 0, n). outdoor(6, 4, s).
The client GUI
The
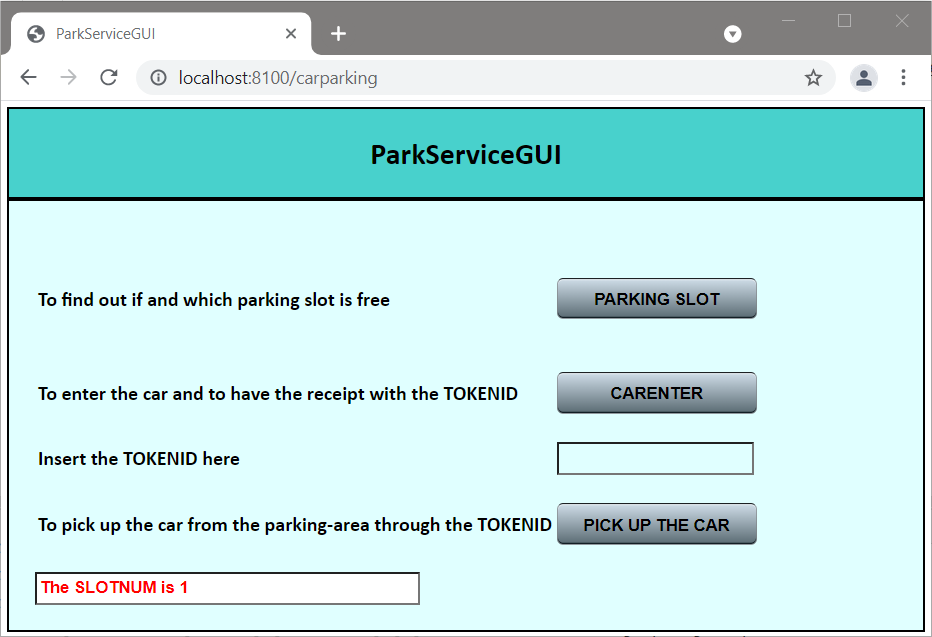
The GUI sends messages to the business logic as an
The messages
Testing
We just need to check wether the trolley manages to reach the correct points of interest in the correct order and in a sensible amount of time. Moreover, the trolley must be unaffected by enter requests while the parking-slot is full or exit requests while it's empty. The
The class
The full test plan for this sprint can be retrieved from the following local link: Sprint1Test.kt (copy on GitHub here). We report hereunder the most significant fragments:
@Test
fun checkCleanSequence() {
actor!!.forward("enterRequest", "enterRequest(0)", "parkmanagerserviceactor")
assertNotMovingInTime(3000)
actor!!.forward("carEnter", "carEnter(1)", "parkmanagerserviceactor")
assertLocationInTime("6", "0", "N", 10000)
assertLocationInTime("1", "1", "E", 10000)
assertLocationInTime("0", "0", "S", 10000)
assertNotMovingInTime(3000)
actor!!.forward("exitRequest", "exitRequest(1)", "parkmanagerserviceactor")
assertLocationInTime("1", "1", "E", 10000)
assertLocationInTime("6", "4", "S", 10000)
assertLocationInTime("0", "0", "S", 50000)
assertNotMovingInTime(3000)
}
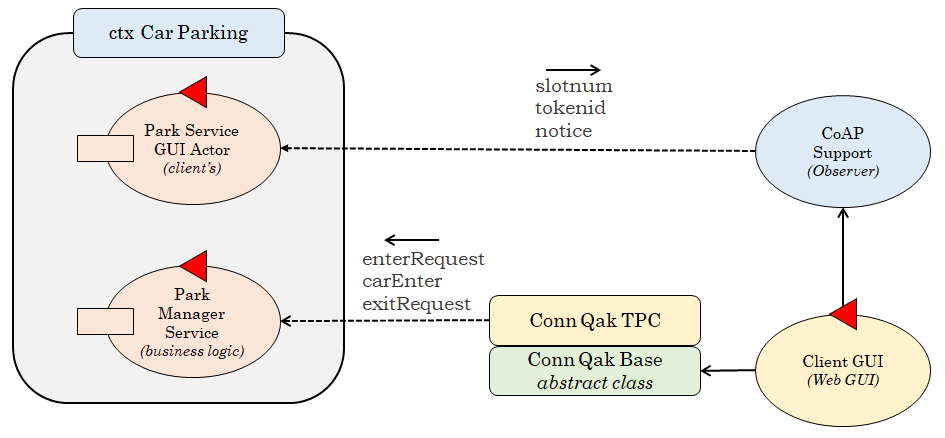
Summary architecture of the system as of Sprint 1
 |
Executable model: trolley.qak | Test plan: Sprint1Test.kt |
New workplan
Because of other exams we had to take, the delivery dates have shifted.
Sprint 1 will be delivered on
We expect Sprint 2 to be completed within
We expect Sprint 3 to be completed within
We expect the whole project to be finished by

