Sprint 1
Sprint 2
Project
Sprint 3
Six parking slots
The car park now has
Each parking slot is represented by a
parking1(1, 1, e). parking2(1, 2, e). parking3(1, 3, e). parking4(4, 1, w). parking5(4, 2, w). parking6(4, 3, w).
The finite-state machine describing the business logic remains essentially the same. The only difference concerning its states is that the state
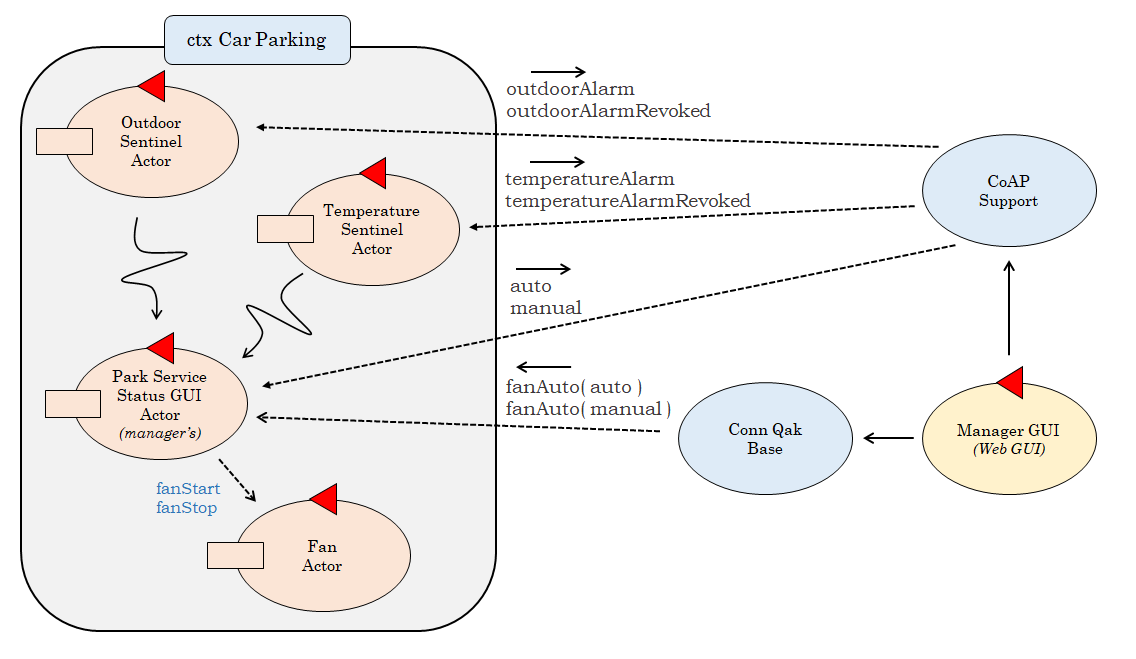
Alarms and automatic fan
The
When the user sets the fan to be handled automatically,
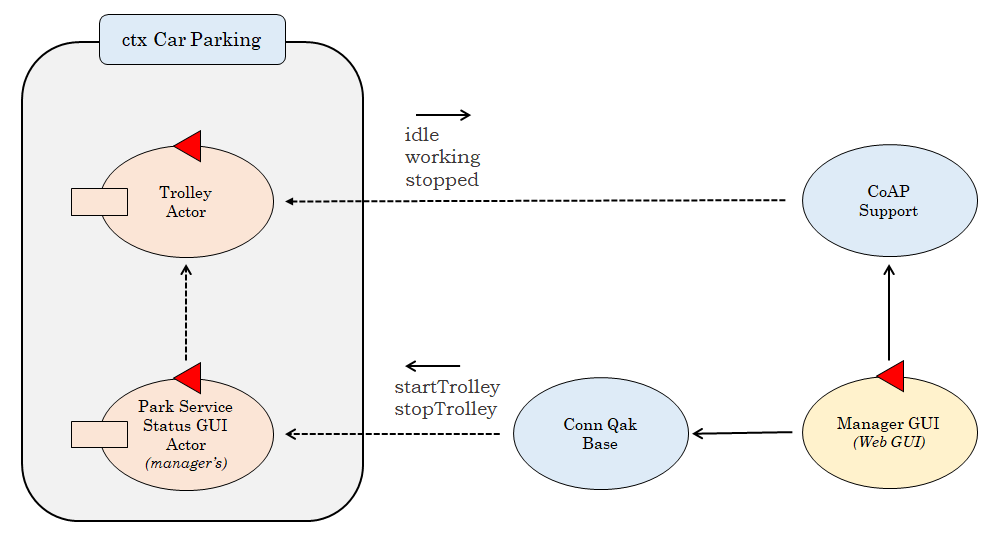
Trolley start and stop
The
The external
The real sonar device
In addition to the use of a mock-object for the simulation of the presence/absence of the car in the OUTDOOR, a
Experiments shown that the minimum distance that the sonar is able to intercept is 3 cm, while the maximum is 42 cm. For this reason we established a
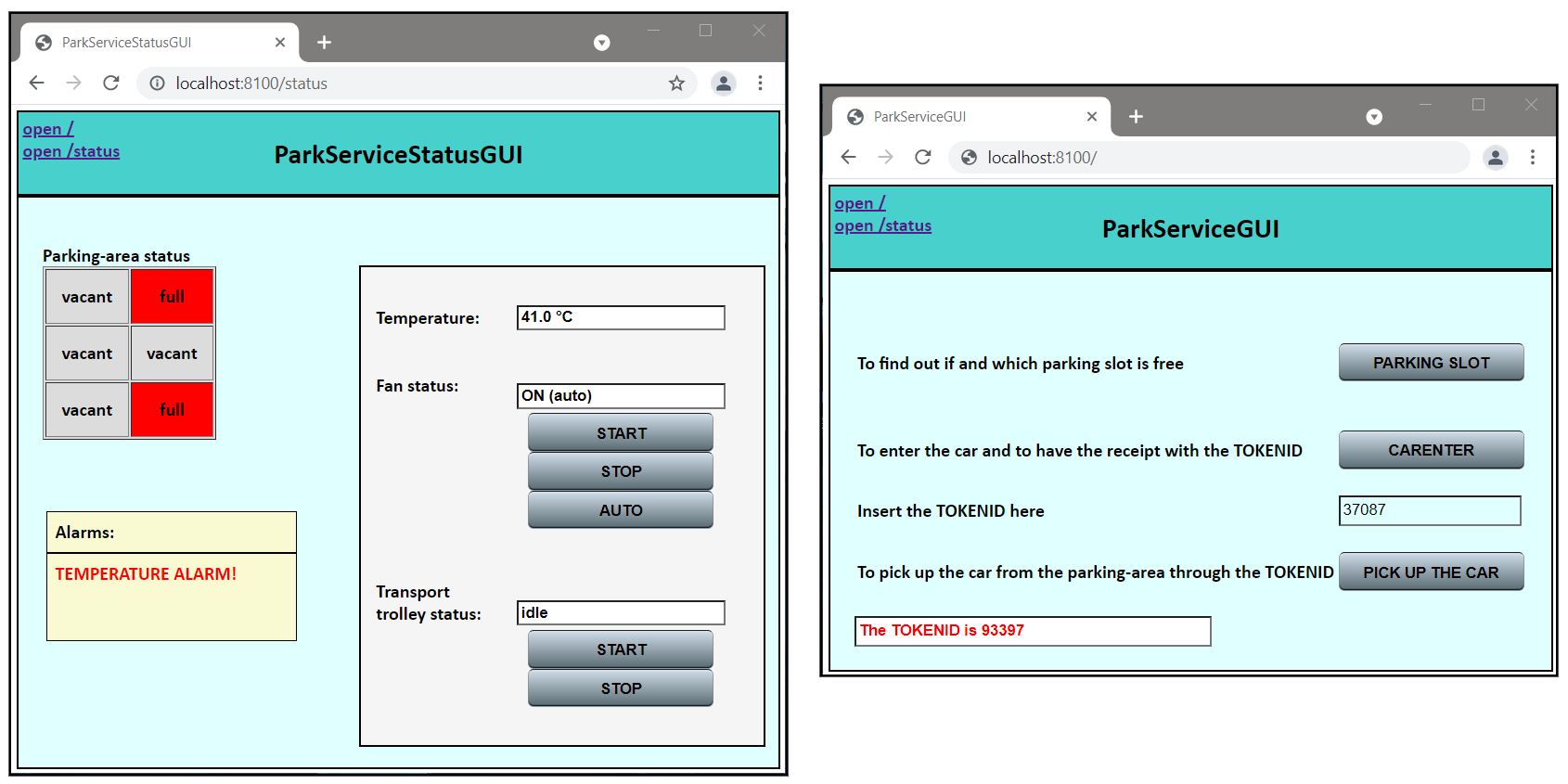
The complete Manager GUI and Client GUI
As a result of the enhancements previously described, the
Testing
To simplify the writing of test cases, we introduced a new class called
Tests from Sprint 1 and Sprint 2 must still hold, however they had to be adapted to deal with the multiple parking-slots. We report hereunder only the most significant fragments of each new test case:
@Test
fun checkSlots() {
var cco = CarparkingCoapObserver("parkserviceguiactor", blocking = true, verbose = false)
actor!!.forward("enterRequest", "enterRequest(0)", "parkmanagerserviceactor")
var slotnum6 = cco.observePayload()
actor!!.forward("carEnter", "carEnter(0)", "parkmanagerserviceactor")
var tokenid6 = cco.observePayload()
assertLocationInTime("6", "0", "N", 10000)
assertLocationInTime("4", "3", "W", 10000)
// REPEAT FOR EVERY PARKING-SLOT
// ALL PARKING-SLOTS ARE NOW FULL
actor!!.forward("enterRequest", "enterRequest(0)", "parkmanagerserviceactor")
assertSlotnum(cco, "0")
actor!!.forward("exitRequest", "exitRequest($tokenid4)", "parkmanagerserviceactor")
assertLocationInTime("4", "1", "W", 10000)
assertLocationInTime("6", "4", "S", 10000)
actor!!.forward("exitRequest", "exitRequest($tokenid4)", "parkmanagerserviceactor")
assertNotice(cco, "tokenid(invalid)")
}
@Test
fun checkAlarms() {
val ccoo = CarparkingCoapObserver("outdoorsentinelactor", blocking = true)
actor!!.emit("outdoorCleared", "outdoorCleared(0)")
assertNoEventInTime(ccoo, 1000)
actor!!.emit("outdoorOccupied", "outdoorOccupied(0)")
assertNoEventInTime(ccoo, 4000)
assertEvent(ccoo, "outdoorAlarm(0)")
actor!!.emit("outdoorCleared", "outdoorCleared(0)")
assertEvent(ccoo, "outdoorAlarmRevoked(0)")
val ccof = CarparkingCoapObserver("fanactor", blocking = true)
actor!!.forward("fanAuto", "fanAuto(auto)", "parkservicestatusguiactor")
actor!!.emit("temperatureAlarm", "temperatureAlarm(0)")
assertEvent(ccof, "fanStart(0)")
actor!!.emit("temperatureAlarmRevoked", "temperatureAlarmRevoked(0)")
assertEvent(ccof, "fanStop(0)")
actor!!.forward("fanAuto", "fanAuto(manual)", "parkservicestatusguiactor")
actor!!.emit("temperatureAlarm", "temperatureAlarm(0)")
assertNoEventInTime(ccof, 1000)
actor!!.emit("temperatureAlarmRevoked", "temperatureAlarmRevoked(0)")
assertNoEventInTime(ccof, 1000)
}
@Test
fun checkTrolleyStop() {
actor!!.forward("stopTrolley", "stopTrolley(0)", "trolleyactor")
actor!!.forward("goto", "goto(parking6)", "trolleyactor")
assertNotMovingInTime(2000)
actor!!.forward("startTrolley", "startTrolley(0)", "trolleyactor")
assertLocationInTime("4", "3", "W", 10000)
assertNotMovingInTime(2000)
actor!!.forward("goto", "goto(home)", "trolleyactor")
delay(2000)
actor!!.forward("stopTrolley", "stopTrolley(0)", "trolleyactor")
assertNotMovingInTime(2000)
actor!!.forward("startTrolley", "startTrolley(0)", "trolleyactor")
assertLocationInTime("0", "0", "S", 10000)
assertNotMovingInTime(2000)
}
Summary final architecture of the system
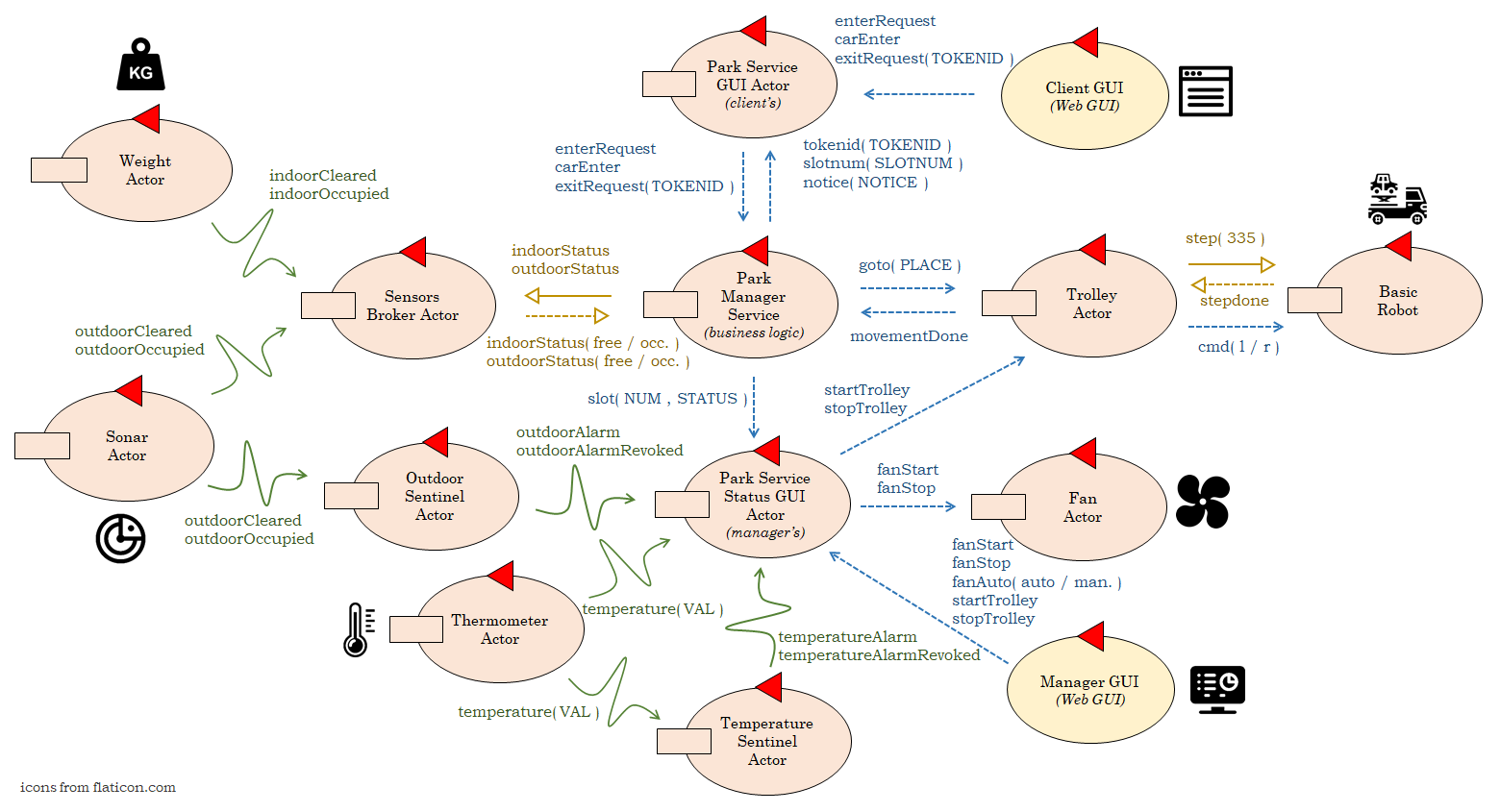 |
|
| Executable model: trolley.qak | Test plan: Sprint3Test.kt |
Distribution of work
Fantazzini Giacomo carried out the realizzation of the mock objects (fan, thermometer, sonar, weight sensor), the dynamics of the trolley and the JavaScript code, while Badalamenti Claudia took care of the realization of the GUIs, the business logic of the project and the support for the real sonar device.In both cases, the colleagues helped each other in the realization of each part.

